Step size controllers¤
The list of step size controllers is as follows. The most common cases are fixed step sizes with diffrax.ConstantStepSize and adaptive step sizes with diffrax.PIDController.
Adaptive SDEs
When solving SDEs with an adaptive step controller, then three requirements must be met for the solution to converge to the correct result:
- the Brownian motion must be generated with
diffrax.VirtualBrownianTree; - the solver must satisfy certain technical conditions (in practice all SDE solvers except
diffrax.Eulersatisfy these), - the SDE must either have commutative noise, or
ClipStepSizeController(..., store_rejected_steps=...)must be used.
Conditions 1 and 2 are checked by Diffrax. Condition 3 is not (as there is no easy way to verify commutativity of the noise).
For more details about the convergence of adaptive solutions to SDEs, please refer to
@misc{foster2024convergenceadaptiveapproximationsstochastic,
title={On the convergence of adaptive approximations for stochastic differential equations},
author={James Foster and Andraž Jelinčič},
year={2024},
eprint={2311.14201},
archivePrefix={arXiv},
primaryClass={math.NA},
url={https://arxiv.org/abs/2311.14201},
}
Abtract base classes
All of the classes implement the following interface specified by diffrax.AbstractStepSizeController.
The exact details of this interface are only really useful if you're using the Manual stepping interface; otherwise this is all just internal to the library.
diffrax.AbstractStepSizeController
Abstract base class for all step size controllers.
wrap(direction: Int[ArrayLike, '']) -> diffrax.AbstractStepSizeController
¤
Remakes this step size controller, adding additional information.
Most step size controllers can't be used without first calling wrap to give
them the extra information they need.
Arguments:
direction: Either 1 or -1, indicating whether the integration is going to be performed forwards-in-time or backwards-in-time respectively.
Returns:
A copy of the the step size controller, updated to reflect the additional information.
init(terms: PyTree[diffrax.AbstractTerm], t0: Real[ArrayLike, ''], t1: Real[ArrayLike, ''], y0: PyTree[Shaped[ArrayLike, '?*y'], 'Y'], dt0: ~_Dt0, args: PyTree[Any], func: Callable[[PyTree[diffrax.AbstractTerm], Real[ArrayLike, ''], PyTree[Shaped[ArrayLike, '?*y'], 'Y'], PyTree[Any]], PyTree[Shaped[ArrayLike, '?*vf'], 'VF']], error_order: Real[ArrayLike, ''] | None) -> tuple[Real[ArrayLike, ''], ~_ControllerState]
¤
Determines the size of the first step, and initialise any hidden state for the step size controller.
Arguments: As diffeqsolve.
func: The value ofsolver.func.error_order: The order of the error estimate. If solving an ODE this will typically besolver.order(). If solving an SDE this will typically besolver.strong_order() + 0.5.
Returns:
A 2-tuple of:
- The endpoint \(\tau\) for the initial first step: the first step will be made
over the interval \([t_0, \tau]\). If
dt0is specified (notNone) then this is typicallyt0 + dt0. (Although in principle the step size controller doesn't have to respect this if it doesn't want to.) - The initial hidden state for the step size controller, which is used the
first time
adapt_step_sizeis called.
adapt_step_size(t0: Real[ArrayLike, ''], t1: Real[ArrayLike, ''], y0: PyTree[Shaped[ArrayLike, '?*y'], 'Y'], y1_candidate: PyTree[Shaped[ArrayLike, '?*y'], 'Y'], args: PyTree[Any], y_error: PyTree[Shaped[ArrayLike, '?*y'], 'Y'] | None, error_order: Real[ArrayLike, ''], controller_state: ~_ControllerState) -> tuple[Bool[ArrayLike, ''], Real[ArrayLike, ''], Real[ArrayLike, ''], Bool[ArrayLike, ''], ~_ControllerState, diffrax.RESULTS]
¤
Determines whether to accept or reject the current step, and determines the step size to use on the next step.
Arguments:
t0: The start of the interval that the current step was just made over.t1: The end of the interval that the current step was just made over.y0: The value of the solution att0.y1_candidate: The value of the solution att1, as estimated by the main solver. Only a "candidate" as it is now up to the step size controller to accept or reject it.args: Any extra arguments passed to the vector field; asdiffrax.diffeqsolve.y_error: An estimate of the local truncation error, as calculated by the main solver.error_order: The order ofy_error. For an ODE this is typically equal tosolver.order(); for an SDE this is typically equal tosolver.strong_order() + 0.5.controller_state: Any evolving state for the step size controller itself, att0.
Returns:
A tuple of several objects:
- A boolean indicating whether the step was accepted/rejected.
- The time at which the next step is to be started. (Typically equal to the
argument
t1, but not always -- if there was a vector field discontinuity there then it may benextafter(t1)instead.) - The time at which the next step is to finish.
- A boolean indicating whether a discontinuity in the vector field has just been passed. (Which for example some solvers use to recalculate their hidden state; in particular the FSAL property of some Runge--Kutta methods.)
- The value of the step size controller state at
t1. - An integer (corresponding to
diffrax.RESULTS) indicating whether the step happened successfully, or if it failed for some reason. (e.g. hitting a minimum allowed step size in the solver.)
diffrax.AbstractAdaptiveStepSizeController(diffrax.AbstractStepSizeController)
Indicates an adaptive step size controller.
Accepts tolerances rtol and atol. When used in conjunction with an implicit
solver (diffrax.AbstractImplicitSolver), then these tolerances will
automatically be used as the tolerances for the nonlinear solver passed to the
implicit solver, if they are not specified manually.
diffrax.ConstantStepSize(diffrax.AbstractStepSizeController)
Use a constant step size, equal to the dt0 argument of
diffrax.diffeqsolve.
__init__()
¤
Arguments:
None.
diffrax.StepTo(diffrax.AbstractStepSizeController)
Make steps to just prespecified times.
__init__(ts: Any)
¤
Arguments:
ts: The times to step to. Must be an increasing/decreasing sequence of times between thet0andt1(inclusive) passed todiffrax.diffeqsolve. Correctness oftswith respect tot0andt1as well as its monotonicity is checked by the implementation.
diffrax.PIDController(diffrax.AbstractAdaptiveStepSizeController)
Adapts the step size to produce a solution accurate to a given tolerance.
The tolerance is calculated as atol + rtol * y for the evolving solution y.
Steps are adapted using a PID controller.
Choosing tolerances
The choice of rtol and atol are used to determine how accurately you would
like the numerical approximation to your equation.
Typically this is something you already know; or alternatively something for
which you try a few different values of rtol and atol until you are getting
good enough solutions.
If you're not sure, then a good default for easy ("non-stiff") problems is
often something like rtol=1e-3, atol=1e-6. When more accurate solutions
are required then something like rtol=1e-7, atol=1e-9 are typical (along
with using float64 instead of float32).
(Note that technically speaking, the meaning of rtol and atol is entirely
dependent on the choice of solver. In practice however, most solvers tend to
provide similar behaviour for similar values of rtol, atol. As such it is
common to refer to solving an equation to specific tolerances, without
necessarily stating which solver was used.)
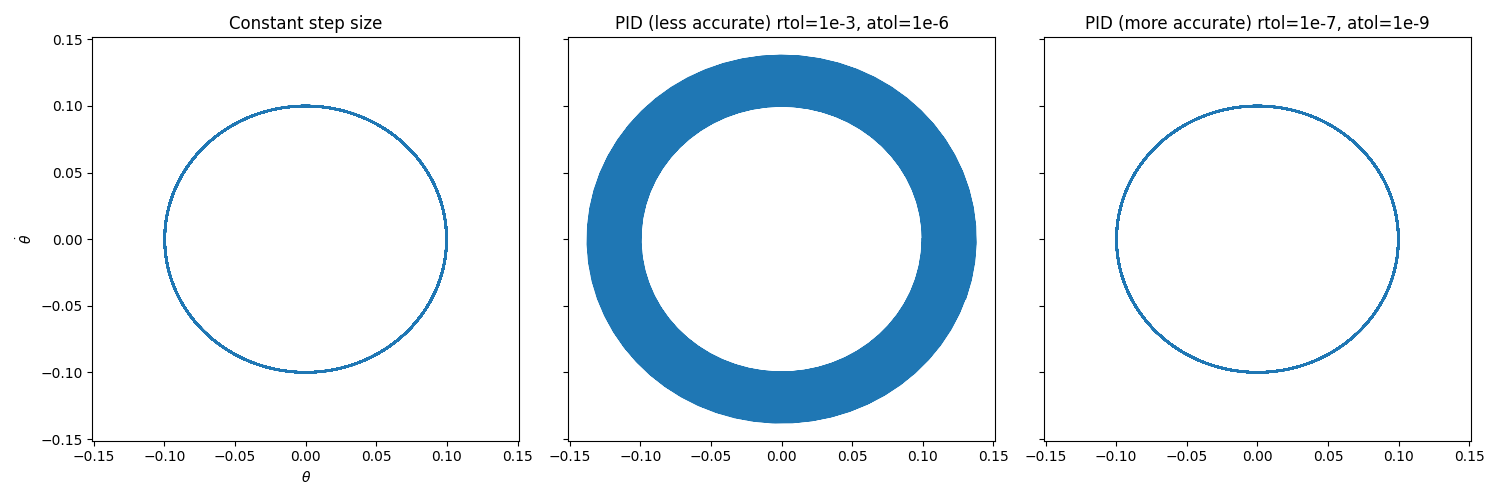
Example
The choice of rtol and atol can have a significant impact on the
accuracy of even simple systems.
Consider a simple pendulum with a small angle kick:
import diffrax as dfx
def dynamics(t, y, args):
dtheta = y["omega"]
domega = - jnp.sin(y["theta"])
return dict(theta=dtheta, omega=domega)
y0 = dict(theta=0.1, omega=0)
term = dfx.ODETerm(dynamics)
sol = dfx.diffeqsolve(
term, solver, t0=0, t1=1000, dt0=0.1, y0,
saveat=dfx.SaveAts(ts=jnp.linspace(0, 1000, 10000),
max_steps=2**20,
stepsize_controller=...
)
PID_controller_incorrect = diffrax.PIDController(rtol=1e-3, atol=1e-6)
PID_controller_correct = diffrax.PIDController(rtol=1e-7, atol=1e-9)
Constant_controller = diffrax.ConstantStepSize()
rtol and atol on the accuracy of
the solution.
Choosing PID coefficients
This controller can be reduced to any special case (e.g. just a PI controller,
or just an I controller) by setting pcoeff, icoeff or dcoeff to zero
as appropriate.
For smoothly-varying (i.e. easy to solve) problems then an I controller, or a
PI controller with icoeff=1, will often be most efficient.
PIDController(pcoeff=0, icoeff=1, dcoeff=0) # default coefficients
PIDController(pcoeff=0.4, icoeff=1, dcoeff=0)
For moderate difficulty problems that may have an error estimate that does not vary smoothly, then a less sensitive controller will often do well. (This includes many mildly stiff problems.) Several different coefficients are suggested in the literature, e.g.
PIDController(pcoeff=0.4, icoeff=0.3, dcoeff=0)
PIDController(pcoeff=0.3, icoeff=0.3, dcoeff=0)
PIDController(pcoeff=0.2, icoeff=0.4, dcoeff=0)
For SDEs (an extreme example of a problem type that does not have smooth behaviour) then an insensitive PI controller is recommended. For example:
PIDController(pcoeff=0.1, icoeff=0.3, dcoeff=0)
The best choice is largely empirical, and problem/solver dependent. For most
moderately difficult ODE problems it is recommended to try tuning these
coefficients subject to pcoeff>=0.2, icoeff>=0.3, pcoeff + icoeff <= 0.7.
You can check the number of steps made via:
sol = diffeqsolve(...)
print(sol.stats["num_steps"])
References
Both the initial step size selection algorithm for ODEs, and the use of an I controller for ODEs, are from Section II.4 of:
@book{hairer2008solving-i,
address={Berlin},
author={Hairer, E. and N{\o}rsett, S.P. and Wanner, G.},
edition={Second Revised Edition},
publisher={Springer},
title={{S}olving {O}rdinary {D}ifferential {E}quations {I} {N}onstiff
{P}roblems},
year={2008}
}
The use of a PI controller for ODEs are from Section IV.2 of:
@book{hairer2002solving-ii,
address={Berlin},
author={Hairer, E. and Wanner, G.},
edition={Second Revised Edition},
publisher={Springer},
title={{S}olving {O}rdinary {D}ifferential {E}quations {II} {S}tiff and
{D}ifferential-{A}lgebraic {P}roblems},
year={2002}
}
and Sections 1--3 of:
@article{soderlind2002automatic,
title={Automatic control and adaptive time-stepping},
author={Gustaf S{\"o}derlind},
year={2002},
journal={Numerical Algorithms},
volume={31},
pages={281--310}
}
The use of PID controllers are from:
@article{soderlind2003digital,
title={{D}igital {F}ilters in {A}daptive {T}ime-{S}tepping,
author={Gustaf S{\"o}derlind},
year={2003},
journal={ACM Transactions on Mathematical Software},
volume={20},
number={1},
pages={1--26}
}
The use of PI and PID controllers for SDEs are from:
@article{burrage2004adaptive,
title={Adaptive stepsize based on control theory for stochastic
differential equations},
journal={Journal of Computational and Applied Mathematics},
volume={170},
number={2},
pages={317--336},
year={2004},
doi={https://doi.org/10.1016/j.cam.2004.01.027},
author={P.M. Burrage and R. Herdiana and K. Burrage},
}
@article{ilie2015adaptive,
author={Ilie, Silvana and Jackson, Kenneth R. and Enright, Wayne H.},
title={{A}daptive {T}ime-{S}tepping for the {S}trong {N}umerical {S}olution
of {S}tochastic {D}ifferential {E}quations},
year={2015},
publisher={Springer-Verlag},
address={Berlin, Heidelberg},
volume={68},
number={4},
doi={https://doi.org/10.1007/s11075-014-9872-6},
journal={Numer. Algorithms},
pages={791–-812},
}
__init__(rtol: Real[ArrayLike, ''], atol: Real[ArrayLike, ''], norm: Callable[[PyTree], Real[ArrayLike, '']] = <function rms_norm>, pcoeff: Real[ArrayLike, ''] = 0, icoeff: Real[ArrayLike, ''] = 1, dcoeff: Real[ArrayLike, ''] = 0, dtmin: Real[ArrayLike, ''] | None = None, dtmax: Real[ArrayLike, ''] | None = None, force_dtmin: bool = True, factormin: Real[ArrayLike, ''] = 0.2, factormax: Real[ArrayLike, ''] = 10.0, safety: Real[ArrayLike, ''] = 0.9, error_order: Real[ArrayLike, ''] | None = None)
¤
Arguments:
rtol: Relative tolerance.atol: Absolute tolerance.pcoeff: The coefficient of the proportional part of the step size control.icoeff: The coefficient of the integral part of the step size control.dcoeff: The coefficient of the derivative part of the step size control.dtmin: Minimum step size. The step size is either clipped to this value, or an error raised if the step size decreases below this, depending onforce_dtmin.dtmax: Maximum step size; the step size is clipped to this value.force_dtmin: How to handle the step size hitting the minimum. IfTruethen the step size is clipped todtmin. IfFalsethen the differential equation solve halts with an error.factormin: Minimum amount a step size can be decreased relative to the previous step.factormax: Maximum amount a step size can be increased relative to the previous step.norm: A functionPyTree -> Scalarused in the error control. Precisely, step sizes are chosen so thatnorm(error / (atol + rtol * y))is approximately one.safety: Multiplicative safety factor.error_order: Optional. The order of the error estimate for the solver. Can be used to override the error order determined automatically, if extra structure is known about this particular problem. (Typically when solving SDEs with known structure.)
diffrax.ClipStepSizeController(diffrax.AbstractAdaptiveStepSizeController)
Wraps an existing step controller with three pieces of functionality:
- Have the solver step exactly to certain times ('
step_ts'). - Have the solver step to just before and just after certain time ('
jump_ts'). - Have the solver record the times of rejected steps, and step exactly to those times in future steps.
In all cases this essentially corresponds to clipping steps so that any that are 'too large' will instead by clipped from one of the three above cases.
Stepping exactly to certain times can be useful if you want to ensure that your
solution is highly accurate at that exact time point -- by default Diffrax will
adaptively step wherever it likes, and then interpolate to produce the output values
in SaveAt(ts=...).
Specifying jump times is needed for computational efficiency when solving differential equations for which the vector field has known jumps (e.g. due to a discontinuous forcing term). Otherwise an adaptive solver must reject many steps as it slows down to try and locate a jump. When using this, the solver will step to the floating point number immediately before the jump, and then resume solving from the floating point number immediately after it, with the jump itself not being evaluated.
Revisiting rejected steps is needed when adaptively solving SDEs with noncommutative noise. Otherwise, a small bias may be introduced in the higher-order (Lévy area) terms of the solution, as it is possible to reject a step because of the samples drawn in these higher order terms.
Citation
For more details on revisiting rejected steps when adaptively solving SDEs, see:
@misc{foster2024convergenceadaptiveapproximationsstochastic,
title={On the convergence of adaptive approximations for
stochastic differential equations},
author={James Foster and Andraž Jelinčič},
year={2024},
eprint={2311.14201},
archivePrefix={arXiv},
primaryClass={math.NA},
url={https://arxiv.org/abs/2311.14201},
}
__init__(controller: diffrax.AbstractAdaptiveStepSizeController[~_ControllerState, ~_Dt0], step_ts: None | Sequence[Real[ArrayLike, '']] | Real[Array, 'steps'] = None, jump_ts: None | Sequence[Real[ArrayLike, '']] | Real[Array, 'jumps'] = None, store_rejected_steps: int | None = None)
¤
Arguments:
controller: The controller to wrap. Can be anydiffrax.AbstractAdaptiveStepSizeController.step_ts: Denotes extra times that must be stepped to.jump_ts: Denotes extra times that must be stepped to, and at which the vector field has a known discontinuity. (This is used to force FSAL solvers to re-evaluate the vector field.)store_rejected_steps: If this is set to a positive integer, then any rejected steps will have their time stored, and that time will be stepped to exactly in a later step. This is used when solving SDEs with noncommutative noise, for which this ensures that the distribution coming from Lévy area terms is correct. Setting this to e.g.100should be plenty, but if more consecutive steps are rejected, then a runtime error will be raised. (Note that this is not the total number of rejected steps in a solve, but just the maximum number of consecutive rejected steps.)